Upskill at Work
La numérisation redéfinit les compétences nécessaire des travailleurs. En particulier, de nouvelles interfaces permettant l'acquisition des compétences permettant le contrôle de robot sont nécessaires pour une production agile.
Fiche signalétique
- Départements participants Technique et informatique
- Institut(s) Institute for Human Centered Engineering (HUCE)
- Unité(s) de recherche HUCE / Laboratoire de perception informatique et réalité virtuelle
- Organisation d'encouragement BFH
- Durée 01.01.2021 - 31.12.2021
- Direction du projet Prof. Dr. Sarah Dégallier Rochat
- Mots-clés Interaction Homme-Machine, Programmation robotique, Montée en compétences
Situation
La numérisation transforme le travail à travers l'introduction de nouvelles technologies telles que l'intelligence artificielle et la robotique. De nouveaux emplois sont créés, tandis que d'autres tendent à disparaître. Bon nombre des nouveaux emplois en Suisse sont des emplois hautement qualifiés, la plupart d'entre eux nécessitant des compétences numériques. Cependant, la Suisse, comme le reste de l'Europe, connaît une pénurie de travailleurs qualifiés. Si de nombreux programmes de formation continue sont proposés pour acquérir des compétences numériques, ils s'adressent principalement aux personnes ayant une formation de niveau universitaire, alors que les emplois qui ont tendance à disparaître sont plutôt des emplois à compétences moyennes. De nouvelles formes de formation fondées sur l'expérience professionnelle et les besoins des travailleurs sont donc nécessaires pour améliorer les compétences des personnes ayant un niveau d'éducation moyen ou faible afin de garantir la mobilité professionnelle et d'éviter une pénurie de personnel qualifié.
Approche
Le projet vise à développer une interface homme-machine (HMI) pour la programmation robotique qui favorise l'acquisition de compétences numériques par l'apprentissage expérimental plutôt que par la cognition symbolique. Pour ce faire, ce projet explorera les facteurs clés d'un apprentissage réussi pour les adultes ayant une formation non universitaire dans l'environnement de travail, la conception d'HMIs intuitives et ancrées dans la connaissance des tâches du travailleur et l'utilisation de ces HMIs pour l'acquisition de nouvelles compétences numériques. A long terme, ce projet vise à contribuer à fournir des outils pédagogiques pour l'acquisition de compétences numériques basées sur la cognition incarnée et l'expérience professionnelle, surmonter les obstacles existants à la participation à la transformation numérique, favoriser l'amélioration des compétences et la mobilité professionnelle des personnes travaillant dans l'atelier et réduire la pénurie de personnel qualifié dans l'industrie suisse. Une conception centrée sur l'utilisateur était prévue pour le projet. Cependant, en raison de la situation liée COVID, il n'a pas été possible d'interagir avec les utilisateurs cibles. L'interface de programmation a donc été développée sur la base de la littérature existante.
Résultat
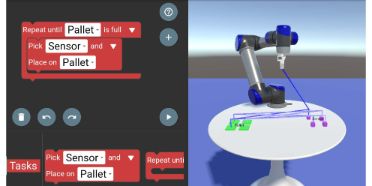
Un langage de programmation visuel destiné à la robotique a été développé sur la base du système Blockly développé par Google. Six tutoriels différents présentant les concepts de base de la programmation tels que les fonctions, les paramètres ou les boucles ont été développés. L'interface a été testée dans le cadre de deux expériences, comptant chacune 58 participants. La première expérience a été réalisée avec des étudiants de l'école de commerce (BFH-W). Le système a ensuite été prêté à l'Université de Fribourg et utilisé pour une deuxième expérience dans le cadre de deux thèses de Bachelor. Un article de conférence est en préparation pour présenter les résultats des deux expériences. En général, l'interface a été évaluée positivement par les utilisateurs et un effet positif significatif sur l'anxiété de programmation a pu être démontré. D'autres tests sont cependant nécessaires pour évaluer de manière robuste les performances et la facilité d'utilisation du système proposé.
Perspectives
Nous aurons l'occasion de tester l'interface avec les utilisateurs cibles dans le cadre d'un projet d'Innosuisse : Agile Robotics for High-Mix Low-Volume Production. Une approche centrée sur l'utilisateur sera adoptée pour concevoir l'interface pour les opérateurs et les techniciens. Elle sera basée sur des observations, des entretiens et des ateliers. L'interface fait également partie du logiciel AutoMate que nous avons développé pour la programmation flexible des robots. Une spin-off a été créée grâce au soutien du programme New Venture proposé la fondation Gerbert Rüf. Elle vise à rendre l'automatisation rentable pour les PME en favorisant la montée en compétence des employés.